

дата первой публикации 21 декабря 2015г.
Ключевые слова тематики: живучесть, прогрессирующее обрушение, механическая безопасность, внезапные структурные повреждения, динамический расчет при внезапно выключающихся связях, динамика прогрессирующего обрушения, модель отказа, первичная и вторичная расчетные схемы.
Рассмотрен простой пример, основанный на методиках, приведенных в зарубежной научной и нормативной литературе. Целевая аудитория данной заметки: студенты старших курсов, магистранты, начинающие специалисты. Цель заметки – популяризация расчетов конструкций на отказы (прогрессирующее обрушение) в динамической постановке.
Обновленная версия примера в публикации "Коэффициенты динамичности при расчете на прогрессирующее обрушение" по ссылке https://dwg.ru/b/d1985/254. На этой странице пример обновляться не будет.


Комментарии
Авторизоваться
https://yadi.sk/i/I-l62qQ9cTYXTA
Благодарю!
Цитата:Сообщение #7 от _line
Добрый день! Подскажите пожалуйста, куда делась страница между 4й и 5й? По нумерации всё нормально, а по тексту идёт несовпадение (конец 4 стр /= начало 5 стр).
да, пропал фрагмент текста, см. по ссылке. https://yadi.sk/i/I-l62qQ9cTYXT
к сожалению, ссылка нерабочая..
Добрый день! Подскажите пожалуйста, куда делась страница между 4й и 5й? По нумерации всё нормально, а по тексту идёт несовпадение (конец 4 стр /= начало 5 стр).
да, пропал фрагмент текста, см. по ссылке. https://yadi.sk/i/I-l62qQ9cTYXTA
Вопросы
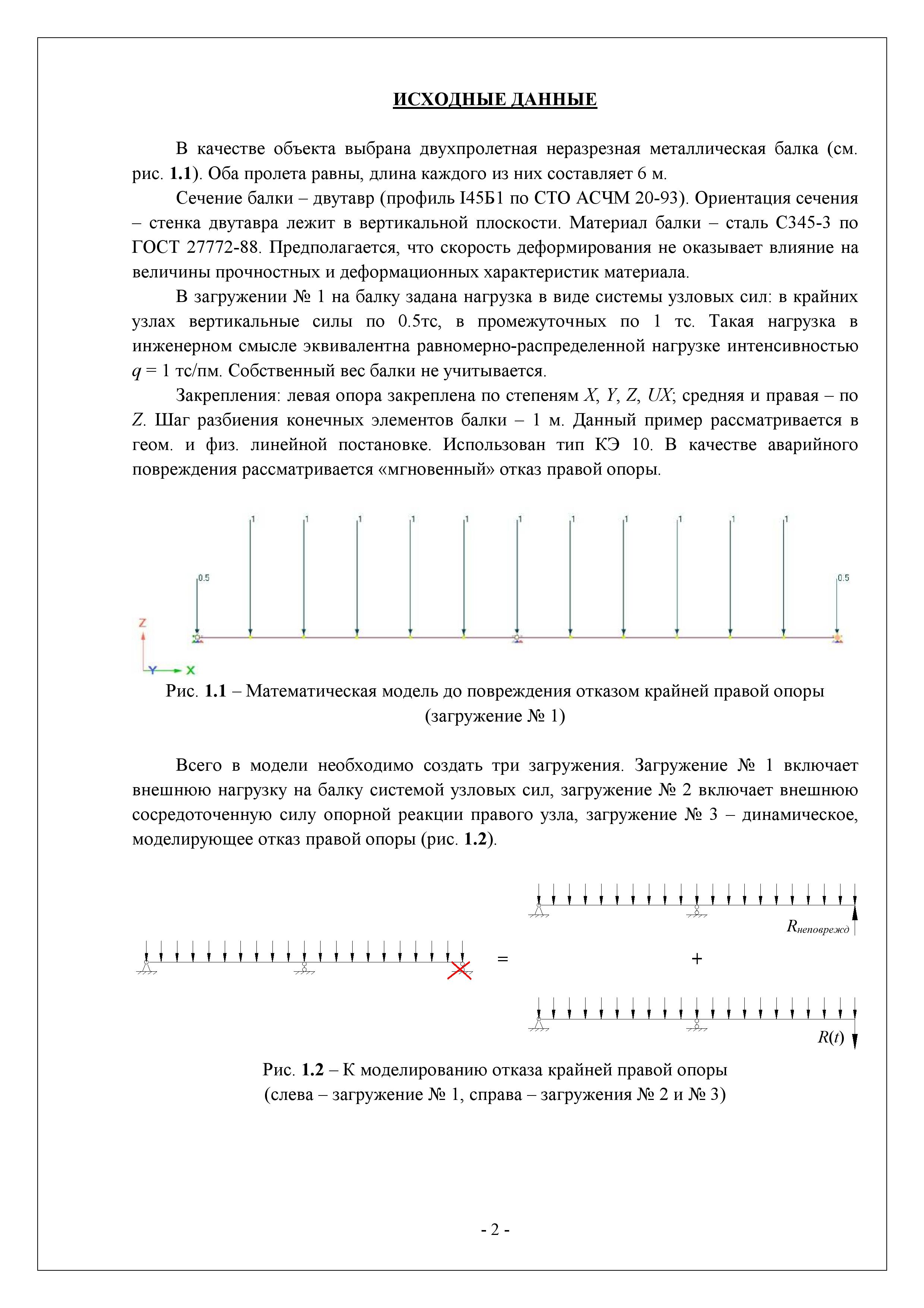
1. В целом для анализа рассматривается схема с 1-им загружением (сила на крайней опоре) или необходима комбинация с основной нагрузкой?
1.1. Есть разные техники, выбор той или иной определяется возможностями расчетного комплекса.
Например, в Femap+Nastran NX можно поступить двумя способами:
- при первом сначала рассчитывается неповрежденная схема (условно, загружение 1). затем формируется второе динамическое загружение с реакцией, подчиненной функциональной зависимости, при которой реакция подает до нуля за время отказа. Но в качестве исходных данных для решения динамической задачи нужно сформировать начальные условия в виде перемещений узлов, полученных по результатам расчета целой модели с загружением 1. Удобно эти начальные перемещения задать в отдельном загружении (например, с номером 3). Этот способ описан на страницах 15 и 16 примера № 2.
- при втором способе (субъективно, он самый удобный) все делается в одном загружении, в котором весовые нагрузки модели и реакция от удаленной опоры подчиняются временным функциям. но разным функциям. реакция – как на рис. 8.3а, весовые нагрузки – как на рис. 8.4.1. по смыслу это соответствует тому, что модель за некоторое время нагружается собственным весом, который возрастает от нуля до 100% и затем остается постоянным (горизонтальный участок графика). а реакции подчиняются функции, при которой они сначала тоже возрастают, а затем падают до нуля.
1.2. В современных версиях Лиры 10 описанными выше способами сделать нельзя, но можно сделать альтернативным способом, использованном в примере 1:
- в первом загружении прикладываются весовые нагрузки, во втором – реакция. хотя можно всё сделать в первом. в следующем нагружении прикладывается динамическая нагрузка по графику 8.3а из примера 2. Главное, чтобы при расчете в физгеом нелинейной постановке на прогрессирующее обрушение все загружения были последовательными. Т.е. последующие нагружения должны «стартовать» с НДС предыдущих.
Раньше такой возможности в Лире не было. Начиная с версии 10.2 или 10.4, такая возможность появилась. Точно знаю, что в Scad её пока нет, что крайне неудобно, поэтому приходится пользоваться Excel - это видно по слайду 24 доклада https://www.haitek.ru/download/news/seminar_scad_2017_3.pdf
Но такой подход, изложенный в вышеупомянутой презентации, применим только для линейных задач. А считать на прогрессирующее обрушение в линейной постановке – значит, закладывать излишний перерасход.
Какой функционал у Robot'a мне не известно.
1. В целом для анализа рассматривается схема с 1-им загружением (сила на крайней опоре) или необходима комбинация с основной нагрузкой
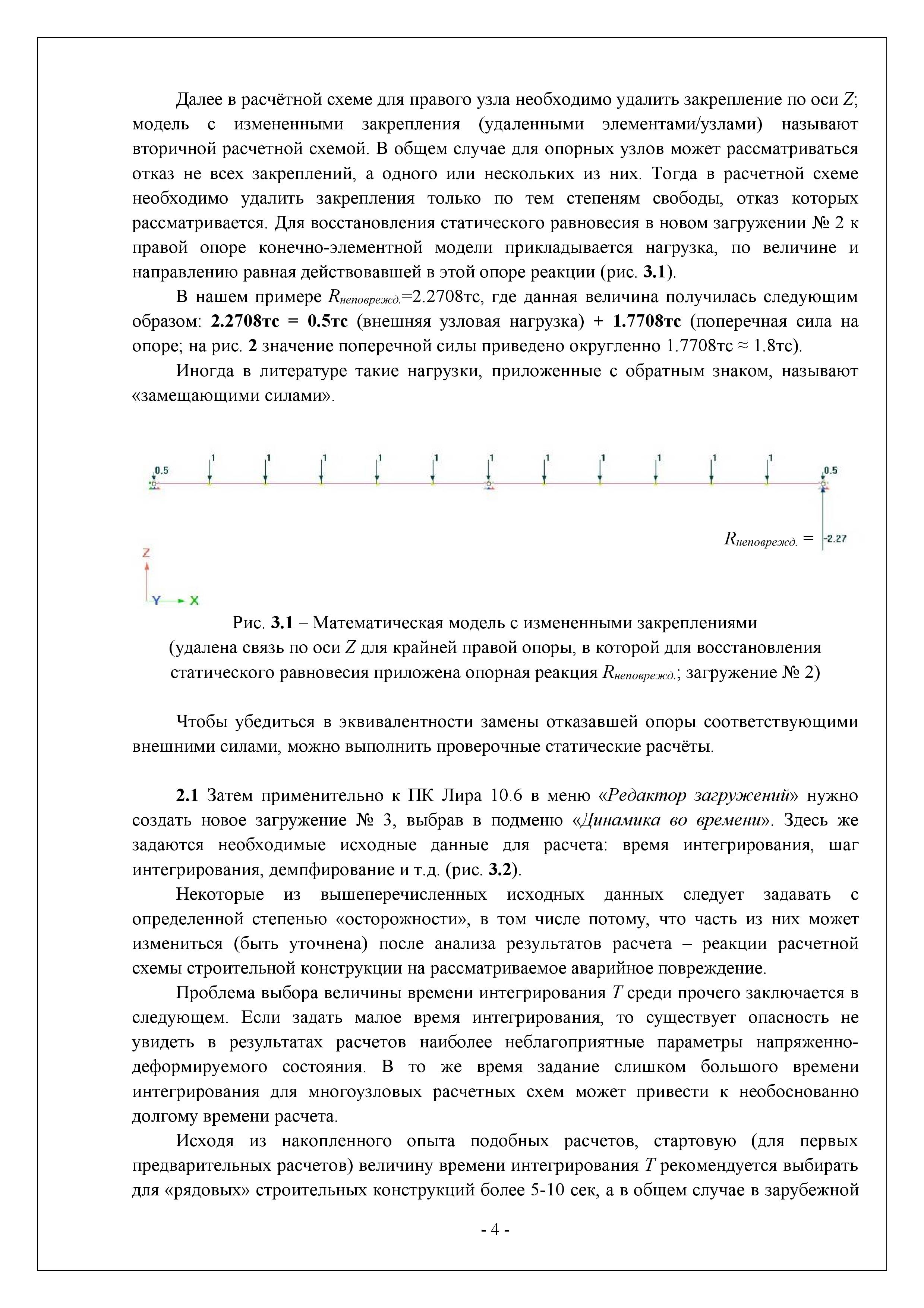
А зачем 0.5тс нагрузки дополнительно при замене опоры на силу? Считаю в Роботе, прикладывая значение реакции - все ок.
Пример был сделан задолго до публикации в блоге – в еще одной из старых версий Лиры, которая тогда не поддерживала распределенные нагрузки в модуле "Динамика +". Поэтому и была необходимость сводить распределенные нагрузки к узловым. В современных версиях такого неудобства уже нет – в итоге с этим проще.
Из-за узловых нагрузок поперечная сила на опоре не равна опорной реакции, в связи с этим надо было показать, как эти значения взаимоувязаны в примере. Иначе возникали вопросы.
Так и должно быть. UX - это закрепление на кручение вокруг продольной оси балки, а не на поворот вокруг оси Y.
Понятно
А зачем 0.5тс нагрузки дополнительно при замене опоры на силу? Считаю в Роботе, прикладывая значение реакции - все ок.
А слева момент =0 ...