

Для обычного жителя нашей страны, когда начинаешь говорить о том, что работаешь с роботизированными автомобильными стоянками, многие не сразу верят, что вообще есть такое. Поэтому любой продукт из этой области для всех будет новшеством, не смотря на то, что "новшество" может быть с "душком" или как сыр с плесенью - реальным товаром. Как отличить первое от второго?
Но, т.к. в данной тематике мало людей, которые ее видели и знают, сравнить не с чем...
А доблестные продавцы оборудования не будут говорить об отрицательных чертах того или иного вида оборудования, т.к. им надо его продавать. Их незачем за это винить. Если у поставщиков оборудования этих компаний нет современных парковочных систем, им приходится продавать не самые современные. А для условий России не самые современные будут прокатывать как "инновационные", как бы странно это не звучало.
Зачем вообще необходимы разные типы систем, почему нельзя их унифицировать и сделать один тип?
Ответ на этот вопрос не прост.
Предлагаю рассмотреть тенденцию развития автоматических парковочных систем.
1) Паллетные системы обмена
Исторически так сложилось, что роботизированные паркинги стали разрабатываться с применением паллеты или поддона. Ориентировочное время разработки первых таких механизмов - начало 70-х годов 20 века.
Автомобиль размещается на специальной паллете и с помощью ее перемещается на место хранения из бокса въезда и обратно.
Все хорошо в это системе, но есть небольшой минус. В моменты пиковой нагрузки на систему (допустим, в вечерние часы при массовой выдаче автомобилей сотрудникам бизнес-центра), паллета, находящаяся в боксе въезда/выезда становится мешающим звеном. Т.е. для выполнения следующей операции по выдаче автомобиля, необходимо паллету из бокса въезда переместить на место, откуда была эта паллета перемещена в бокс въезда с машиной (единственное свободно место) и лишь после этого выполнять операцию по выдаче второго автомобиля.
На практике, это приводит к слишком большому времени ожидания, особенно, если возле бокса въезда/выезда скопилось более 5 водителей, желающих получить свой автомобиль.
Большинство расчетов времени работы системы учитывают только технологическое время работы системы, не учитывая человеческого фактора.

2) Системы обмена паллет
Эта система была предложена как продолжение паллетной системы, но для устранения недостатка паллетных систем добавился еще один механизм - каждое машиноместо и каждый механизм в парковочной системе был оборудован специальным устройством, которое позволяло имеющуюся на нем пустую паллету разместить на машиноместе, а автомобиль с паллетой с машиноместа перемещается на устройство механизма парковочной системы.
Это значительно усложнило все узлы и механизмы паллетной системы, в том числе, отразилось на стоимости. Стоимость возросла.
Но, кроме этого, увеличились габаритные размеры машиномест и приямков устройств (шаттла, робота, грузового подъемника и приемных устройств в боксах въезда/выезда).
Даннные системы разрабатывались уже после введения в эксплуатацию паллетных системы и время их разработки приблизительно 80-90-года 20 века.




3) Беспаллетная система обмена
Альтернативный вариант разработки роботизированной парковочной системы, в котором полностью отказались от паллеты, как переносчика автомобиля.
Начали разрабатывать в начале 2000-х гг.
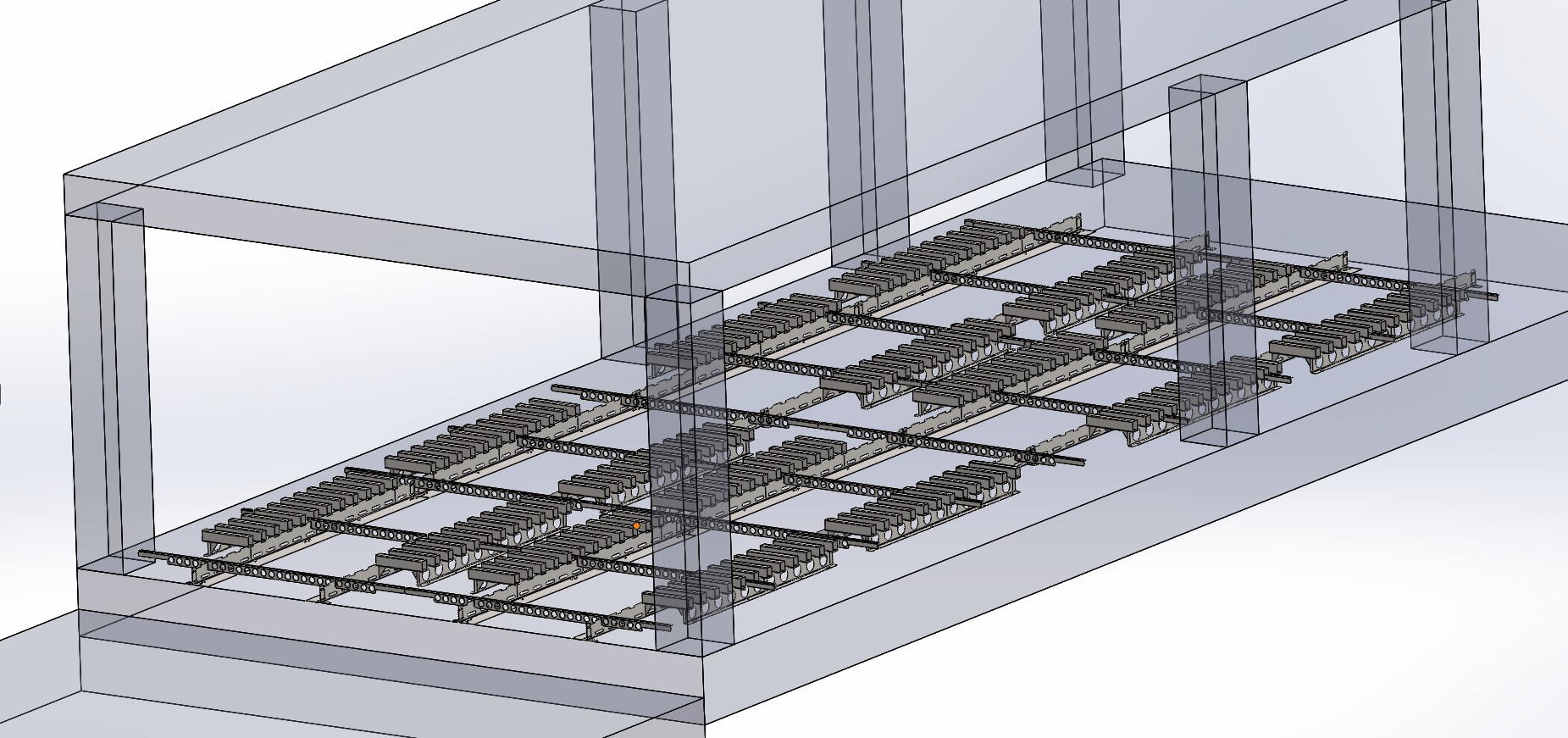
В качестве переносчика автомобиля используется механизм или конструкция решетчатого типа или специальные захваты типа ножниц, которыми фиксируется автомобиль за колеса.
На машиноместе и других промежуточных местах переноса автомобиля необходимо разместить аналогичное устройство, с которого было бы удобно автомобиль забрать.
Это позволило отказаться от паллет и значительно уменьшить время ожидания пользователя. В зависимости от топологии паркинга среднее время ожидания порядка 60-90 сек.


Для большей наглядности привожу ролик, в котором сравнивается время работы двух разных системы - паллетной и беспаллетной.
Для примера были приняты два одинаковых здания, в которых последовательно работали с автомобилями, которые размещались на одни и те же ярусы хранения. Оборудование в одной и второй технологии по средней скорости выполнения каждой операции практически одинаковое, однако технологическая последовательность операций разная.
Главное в этом ролике, что паллетная технология при массовых операциях по выдаче автомобилей очень сильно отстает от беспаллетной технологии обмена.
Эта информация необходима для принятия решения в выборе той или иной технологии.
Надеюсь, она Вам поможет.
Другие записи в блоге "Особенности роботизированных паркингов":
http://dwg.ru/b/robopark/151 - Видео о механизированных парковках разных типов
http://dwg.ru/b/robopark/150 - Битва титанов... Сравнение времени работы двух разных топологий роботизированных паркингов
http://dwg.ru/b/robopark/147 - Пример работы роботизированного паркинга
http://dwg.ru/b/robopark/145 - Механизированный паркинг роторного типа
http://dwg.ru/b/robopark/144 - Автомобильный механизированный гараж для междугородных рейсовых автобусов
http://dwg.ru/b/robopark/143 - Роботизированный паркинг над автомобильной дорогой, железнодорожными путями, открытым участком путей метро и т.д.
http://dwg.ru/b/robopark/142- Москва-Сити. Паркинг на 1400 машиномест в 3 яруса хранения
http://dwg.ru/b/robopark/141 - Личный гараж на балконе рядом с квартирой. Фантастика или такое реально?
http://dwg.ru/b/robopark/140 - Спортивный комплекс на крыше здания. Площадка для отдыха и ресторан там же..
http://dwg.ru/b/robopark/139 - Двор-колодец в СПб. Можно ли построить паркинг в этих условиях?
http://dwg.ru/b/robopark/138 - Здание паркинга с кольцевой рампой и офисной частью. Замена паркинга на робот с офисной частью
http://dwg.ru/b/robopark/137 - Анализ эффективности применения роботизированного паркинга в сравнении с рамповым
http://dwg.ru/b/robopark/136 - Размещение паркингов при планировке кварталов застройки
http://dwg.ru/b/robopark/134 - Характерные ошибки применения механизированного оборудования для увеличения кол-ва машиномест в проектах
http://dwg.ru/b/robopark/133 - Примерный вариант яруса въезда роботизированного паркинга
http://dwg.ru/b/robopark/132 - Внешний вид бокса въезда/выезда
http://dwg.ru/b/robopark/131 - Вариант применения роботизированного паркинга для таксопарка, инкассаторских автомобилей
http://dwg.ru/b/robopark/127 - Почему постоянно не хватает машиномест. Поиск причин и следствие
http://dwg.ru/b/robopark/126 - Роботизированный паркинг. Что это?

Комментарии
Авторизоваться
Вопрос очень хороший и актуальный для условий эксплуатации РФ.
Оборудование было разработано (ТЗ на его разработку это включало) климатические условия эксплуатации (снег, наледь, грязь, низкие и высокие температуры). Акцентирую на этом внимание, то есть, оборудование не адаптировано под другие условия эскплуатации (как обычно любят утверждать продавцы из Кореи и Китая), а оно разрабатывалось с учетом этих особенностей.
По многолетнему опыту эксплуатации данного оборудования в гг. Рига, Владивосток, Сочи, Казань можно уверенно утверждать, что завод-производитель с поставленной задачей справился. Грязь, вода, наледь, сугробы снега под задней аркой автомобиля, песок и камешки и т.п. не влияют на работоспособность паркинга.
На самом деле - это один из самых задаваемых вопросов по беспаллетным решениям.
В основе беспаллетных решений - размещение машиномест хранения на жестком железобетонном каркасе здания, т.е. под машиноместами ж/б перекрытие. Оно не повредится от воздействия снега, грязи, наледи, песка и камешек... Робот весом 2т, перемещаясь на шаттле весом 1т с автомобилем весом до 3т все эти камешки, песок, грязь, наледь, сугробы снега перемелет своим весом и колесами, сдвинув все это в область, в которой он не работает. А уже с этой области все это будет собираться в лотки и стекать в водосборный колодец с пескоуловителем для дальнейшего сброса в ливневку.
Таким образом, утверждение, что для роботизированных паркингов необходимо подключение ТОЛЬКО к сетям электрическим и ливневой канализации будет справедливо.
Здание паркинга полностью роботизировано, постоянного присутствия людей в нем нет. Этим оно и отличается от многих других строений.
Итак, паркинг должен работать в условиях:
- температура от -35 до +45 градусов;
- воздействия снега, грязи, наледи, песка и мелких камушков.
Т.е. мы можем ставить на хранение в паркинг грязные и тяжелые (до 3,0т) автомобили.
Для паркингов открытого типа необходимо предусмотреть мероприятия для предотвращения образования снежных сугробов и наледей по пути движения оборудования путем установки жалюзийных систем на ограждающих конструкциях.
На одном из наших объектов (в г. Владивосток) мы специально для заказчика высыпали ведро щебня на работающий механизм системы - при этом система уверенно продолжала выполнять рабочий цикл, не отвлекаясь на мешающий фактор.
Надеюсь, что ответил на Ваш вопрос.